
CUVIS-spine
네비게이션 기반 척추 수술 로봇
-

Point. 01
2D–3D Registration
진단 CT 기반의 수술 계획은 2D-3D 영상 정합을 통하여 수술에 사용할 수 있습니다.
-
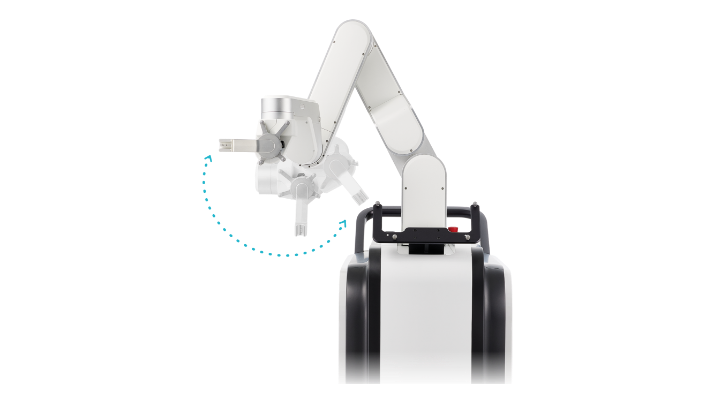
Point. 02
Approach
환자의 자세 변경 없이 수술이 가능해 수술 시간이 단축됩니다.
-

Point. 03
Navigation & Force Tracking
광학식 위치추적 시스템으로 수술 시작부터 종료 시까지 실시간으로 환자, 수술도구 및 나사못의 위치를 추적하고 수술 도구에 가해지는 힘의 방향과 크기를 확인해 나사못의 미끄러짐을 예측하고 위험을 방지합니다.


