
CUVIS-spine
네비게이션 기반 척추 수술 로봇
Intra-only
-

Step. 01
Setup
Robot, Device, Target
-

Step. 02
Scan
C-arm / O-arm
-
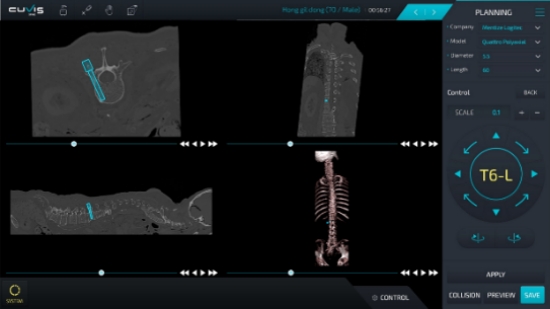
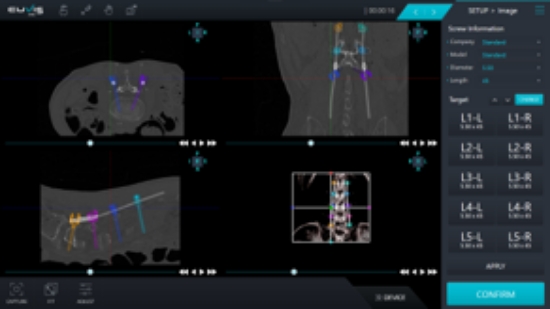
Step. 03
Planning (Intra-op image)
-
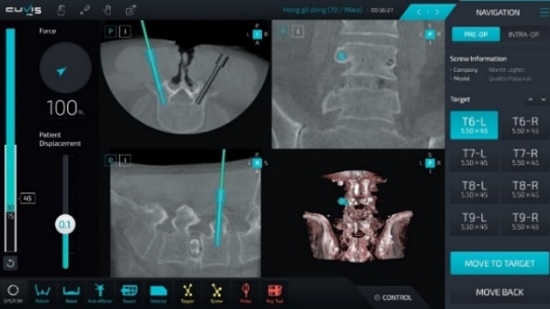
Step. 04
Navigation
2D-3D
-
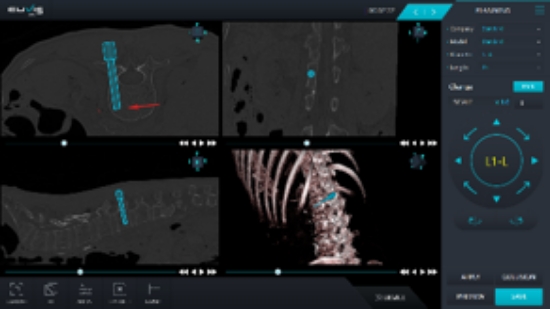
Step. 01
Planning (Pre-CT)
Screw path planning
-
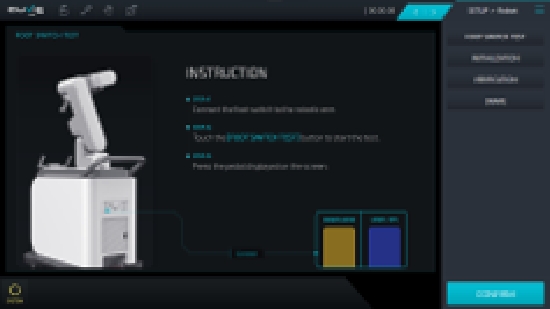
Step. 02
Setup
Robot, Device, Target
-
Step. 03
Load plan
Check screw path planning
-
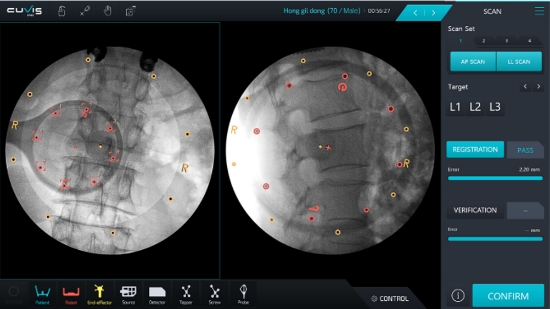
Step. 04
Scan (C-arm)
Scan AP / LL
AP / LL registration
-
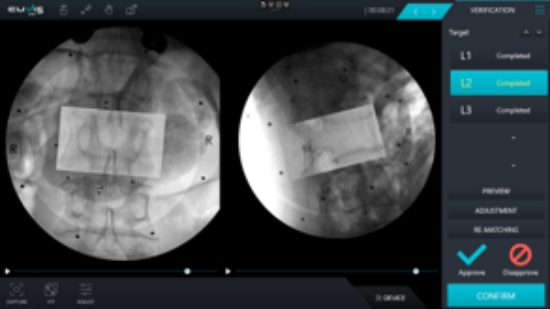
Step. 05
Registration
Auto segmentation
Labelling
2D-3D registration
Verification
-
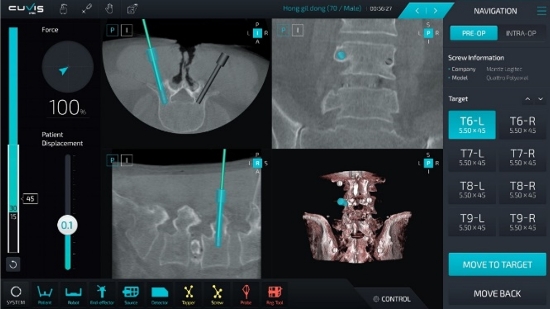
Step. 06
Navigation
Move to target
Incision
Bur
Tapping
Screw insertion


